


¿Qué es un controlador PID?
Un controlador PID es un mecanismo de control por realimentación utilizado en los sistemas de control, específicamente en la industria, para poder introducir un control automático en sus procesos. Su algoritmo de control utiliza los siguientes parámetros Integral, proporcional y derivativo, partiendo de estos mismos el nombre que lleva este mecanismo. Este mecanismo ayuda a calcular el error o la diferencia entre el valor deseado y el valor medido, donde, el valor deseado es el valor que el usuario desea que la máquina o el ordenador que está al mando del proceso quiera alcanzar, mientras que el valor medido es la variable real que se está midiendo, pudiendo esta variar en, temperatura, velocidad, presión o alguna otra variable física de medición. La parte proporcional hace referencia a la variable real que se está controlando o en su caso midiendo dependiendo así mismo un concepto respecto a otro, por otra parte, el parámetro integral se basa en los datos o mejor dicho en los errores pasaos y finalmente la parte integral se basa en anticipar los errores futuros.
Estructura.
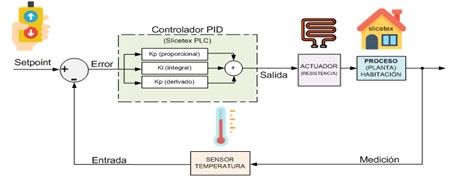
Los principales elementos que conforman a un controlador PID son: Sensor, controlador y actuador. Donde el sensor ayudará a obtener en tiempo y forma la variable física del sistema que se está controlando, pudiendo así mismo está varía en una señal discreta o análoga, y de igual manera pudiéndose representar en tensión eléctrica, intensidad de corriente eléctrica o frecuencia tomando como criterio para la selección de esta última representación varios factores que podrían ser tipo de sensor, contaminación electromagnética, tipo de programación, etc. El controlador en este caso sería básicamente el ordenador o la computadora que estará recabando los datos de salida tanto como de entrada para el correcto funcionamiento del sistema, el más común para este tipo de mecanismos o sistemas de control es un PLC (Controlador Lógico Programable) el cual puede variar según la necesidad que se esté requiriendo. Finalmente, el actuador es el dispositivo que estará ejecutando la tarea principal del sistema, el cual puede ser un actuador, eléctrico (motor eléctrico), pistón neumático y/o hidráulico, térmicos, mecánicos, entre otros.
Funcionamiento.
El controlador lee una señal externa la cual representa el valor que se desea alcanzar, a esta señal se le conoce como punto de consigna o punto de referencia, donde esta señal es compatible en cuanto al tipo de señal y el rango de valores que proporciona el sensor. Para adaptar la interpretación de estas señales es necesario desarrollar un HMI(Human Machine Interface) que son pantallas con información muy fácil de interpretar y manipular además.
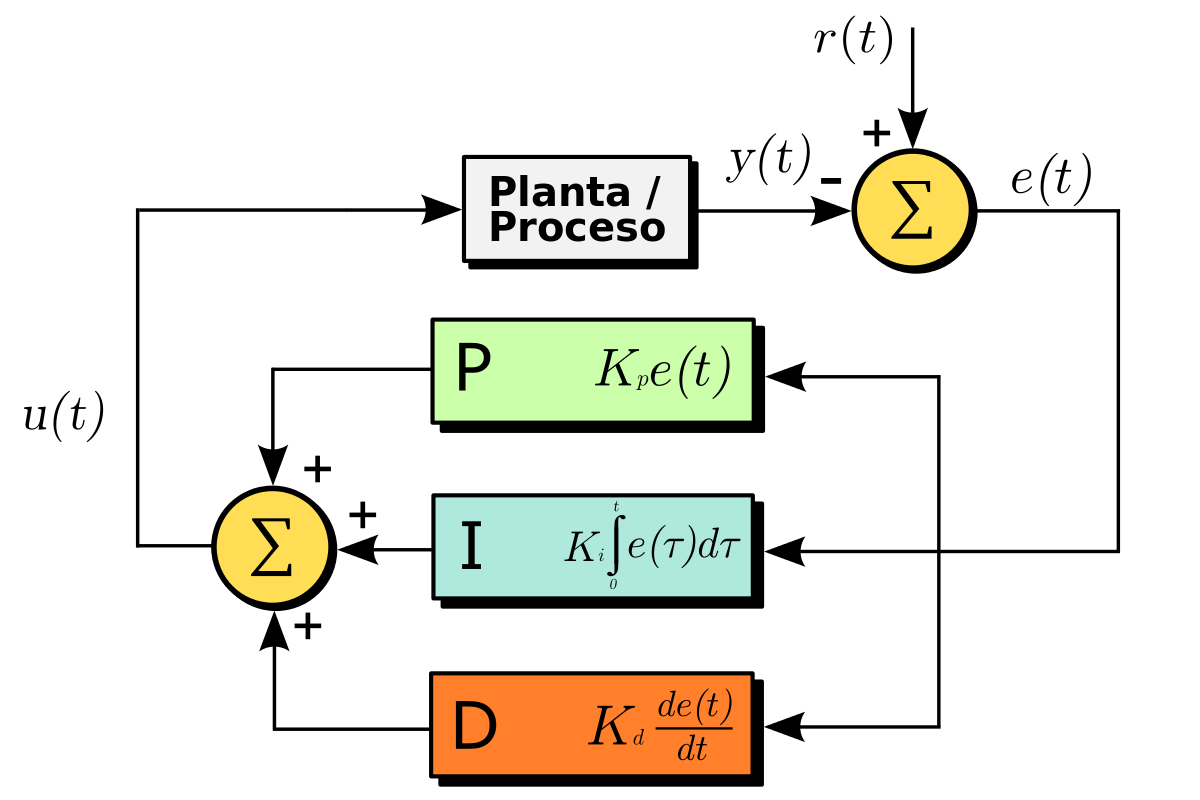
El controlador resta la señal de punto actual a la señal de punto de consigna obteniendo así la señal de error, ayudando así al usuario a visualizar la diferencia entre ambas señales. La señal mencionada anteriormente es utilizada en cada uno de los parámetros que forman al PID, que como resultado de suma se obtiene la señal de salida que el controlador va a utilizar para poder controlar así la planta, o el actuador, aunque esta misma señal llamada “Variable manipulada” no se manda directamente del controlador al actuador sino que se adapta la señal para que pueda ser interpretada de a mejora manera por el mismo actuador.
Aplicaciones del controlador PID
El control PID se aplica a sistemas que requieran de una alta precisión, como aplicaciones de temperatura o presión, en donde la salida final del sistema debe ser lo más cercana a la salida deseada. Además, con estos controladores se logra ajustar parámetros como la velocidad de respuesta y el sobrepaso, vitales en sistemas de posicionamiento.
Un controlador PID puede aplicarse a cualquier sistema o aplicación. Se usa comúnmente para controlar la posición de algún elemento mecánico, como puede ser un servomotor. Sin embargo, su uso se puede extender a controles de temperatura, velocidad, potencia, entre otros.








{kind=link}
Sin comentarios